Крошечные биоботы используют светодиоды и мышечную ткань для дистанционного управления
Еще в 2012 году инженеры создали крошечных двуногих роботов-биоботов, которые использовали настоящую мышечную ткань для ходьбы. Потомки этих ботов теперь оснащены светодиодами, которые позволяют дистанционно управлять ими.
Первоначальные биоботы, разработанные учеными, были меньше сантиметра в длину. У каждого было напечатанное на 3D-принтере мягкое гидрогелевое тело, состоящее из горизонтального позвоночника, прикрепленного к двум вертикальным ножкам.
В то время как первые модели включали сердечную ткань в позвоночнике, в следующей версии использовался кусок спинной мышечной ткани. При воздействии внешнего пульсирующего электрического поля эта ткань (и, следовательно, позвоночник) неоднократно сокращалась, заставляя ноги попеременно шагать вперед при этом.
Это позволяло биоботам ходить, но только по прямой линии.
Ситуация изменилась в 2016 году, когда появилась третья версия, в которую было добавлено кольцо из биоинженерной светочувствительной мышечной ткани.
Точно направив внешний источник синего света на одну или другую сторону биобота, можно было заставить ткань сокращаться только на этой стороне. Таким образом, робота можно было заставить поворачивать влево или вправо.
Тем не менее, подход был немного непрактичным, поскольку требовал, чтобы биобот оставался в местах, где свет мог достичь его.
Последняя версия технологии, названная eBiobot, снова меняет ситуацию.

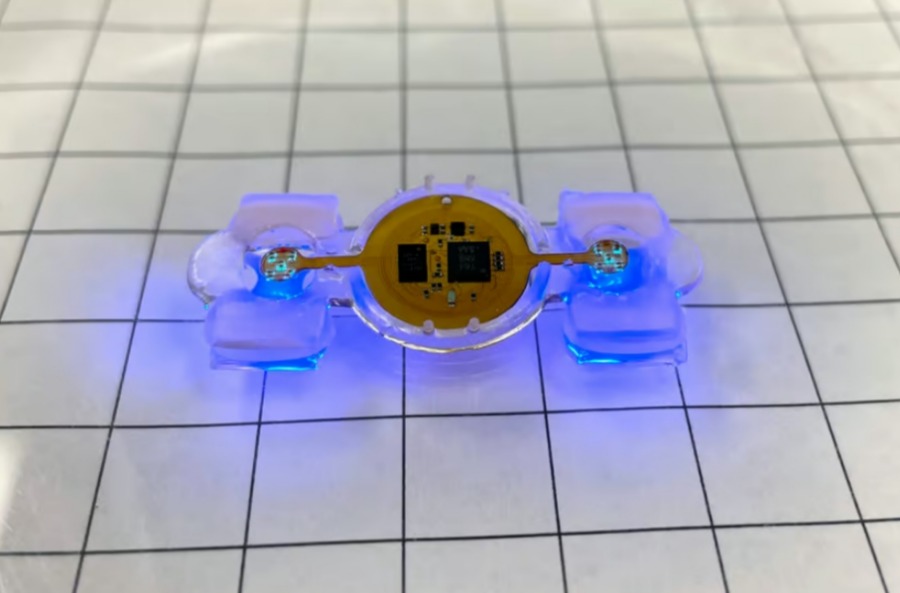
Вместо ног у биобота теперь есть два привода из гидрогеля/мышечной ткани, каждый из которых оснащен микросветодиодом. Между этими исполнительными механизмами находится электронный модуль, который включает в себя приемную катушку.
В ответ на внешний радиосигнал эта катушка включает светодиоды, заставляя их пульсировать. Этот источник света, в свою очередь, заставляет мышечную ткань многократно сокращаться, перемещая привод вперед.
Однако, модулируя сигнал, можно зажечь оба светодиода одновременно или каждый из них по отдельности. Таким образом, eBiobot можно заставить двигаться вперед или поворачивать влево или вправо — без необходимости освещения внешним источником света.
«Интеграция микроэлектроники позволяет объединить биологический мир и мир электроники, оба со многими собственными преимуществами, чтобы теперь производить эти электронные биоботы и машины, которые могут быть полезны для многих медицинских, сенсорных и экологических приложений в будущем», — сказал профессор Рашид Башир, руководивший исследованием.
Статья об исследовании опубликована в журнале Science Robotics.
Присоединяйтесь к нам в соцсетях
