Инженеры создали трехногого робота MARM для работы в открытом космосе
Итальянские инженеры создали космического робота MARM — у него три конечности для оптимальной ловкости и мобильности при работе за бортом космического корабля.
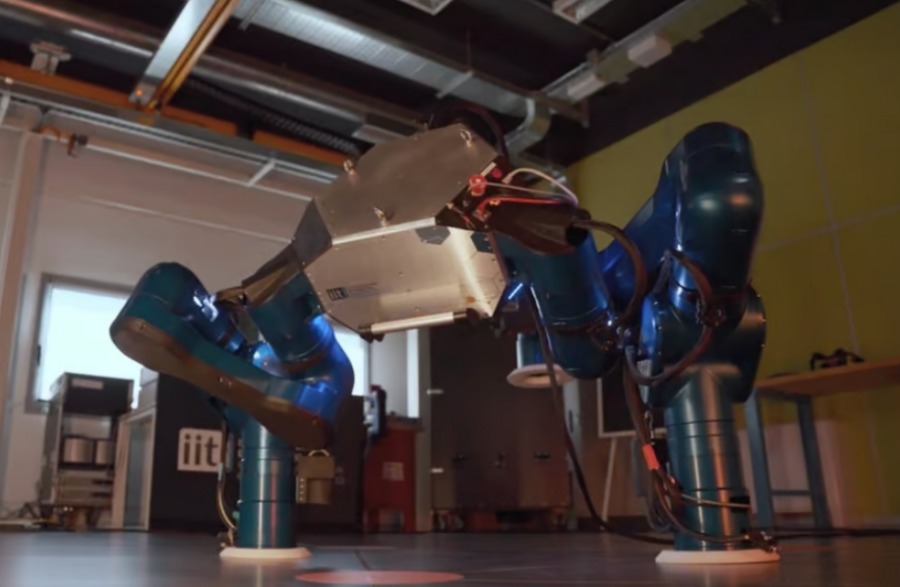
В настоящее время в форме функционального прототипа MARM был создан командой Итальянского технологического института (IIT) под руководством Николаоса Цагаракиса.
Его название является аббревиатурой от многоручного перемещаемого манипулятора, MARM был разработан в рамках проекта Европейского космического агентства MIRROR (многорукий установочный робот для подготовки ORU и отражателей).
И хотя робот предположительно мог бы выполнять широкий спектр задач, он был разработан в первую очередь для того, чтобы перемещаться по внешней стороне космического корабля, устанавливая и/или удаляя орбитальные сменные блоки.
Последние, для краткости называемые ORU, представляют собой любые модульные компоненты космического корабля, которые можно легко заменить по мере необходимости.
В двух словах, робот состоит из поворотного основания, похожего на таз, и трех шарнирных конечностей, которые используются как руки и ноги.
Фиксирующий механизм в нижней части каждой ноги/кисти зацепляет шестиугольные изолирующие плитки, которые покрывают внешнюю часть большинства космических кораблей, надежно удерживая MARM на месте.
Этот же механизм можно использовать для замены плиток в случае необходимости, а также для зарядки батареи робота и отправки/получения данных через стыковочные станции снаружи космического корабля.
Одно из преимуществ конструкции MARM заключается в том, что при ходьбе на трех ногах робот постоянно поддерживает как минимум две точки соприкосновения, а также может легко двигаться в любом направлении.
Кроме того, при использовании одной конечности и ее подвижного основания для выполнения задачи две другие конечности служат в качестве якорей, обеспечивая сверхстабильную операционную платформу.
По словам инженеров, MARM в конечном итоге станет полуавтономным. Например, он будет использовать встроенные камеры, чтобы точно ставить ноги во время ходьбы, но человек-оператор, скорее всего, будет направлять его, когда он берет ORU и ставит их на место.
Планируется, что робот вскоре будет испытан на наземном физическом симуляторе, прежде чем в конечном итоге будет использован на реальном космическом корабле.
MARM можно увидеть в действии на видео ниже.
Присоединяйтесь к нам в соцсетях
