Новая технология декодирования нервно-мышечных сигналов
Исследователи разработали новую технологию декодирования нервно-мышечных сигналов для контроля питания, протезирования запястий и рук. Работа опирается на компьютерные модели, которые точно имитируют поведение естественных структур в предплечье, запястье и руке. Эта технология может также использоваться для разработки новых устройств компьютерного интерфейса для таких приложений, как игры и автоматизированное проектирование.
Технология хорошо зарекомендовала себя на ранних стадиях тестирования, но еще не вступила в клинические испытания, что делает ее недоступной в как минимум нескольких лет. Работа велась исследователями в рамках совместной программы биомедицинской инженерии в университете штата Северная Каролина и университете Северной Каролины в Чапел-Хилл.
Современное состояние протезирования опирается на машинное обучение, чтобы создать» распознавание образов » в подходе к контролю протезирования. Этот подход требует, чтобы пользователи «учили» устройство распознавать конкретные модели мышечной активности и переводить их в команды — такие как открытие или закрытие протезной руки.
«Контроль распознавания образов требует от пациентов пройти длительный процесс обучения их протезированию», — говорит Хелен Хуанг, профессор совместной программы биомедицинской инженерии в университете штата Северная Каролина и в университете в Чапел-Хилл. «Этот процесс может быть утомительным и трудоемким.
«Мы хотели сосредоточиться на том, что мы уже знаем о человеческом теле», — говорит Хелен, которая является старшим автором статьи о работе. «Это не только более интуитивно понятно для пользователей, но и более надежно и практично.
«Это потому, что каждый раз, когда вы меняете свое положение, ваши нервно-мышечные сигналы для создания одного и того же движения руки/запястья меняются. Поэтому полагаться исключительно на машинное обучение означает учить устройство делать одно и то же несколько раз; один раз для каждой различной позы, один раз для того, когда вы потеете, а когда нет, и так далее. Наш подход обходит большую часть всего этого».
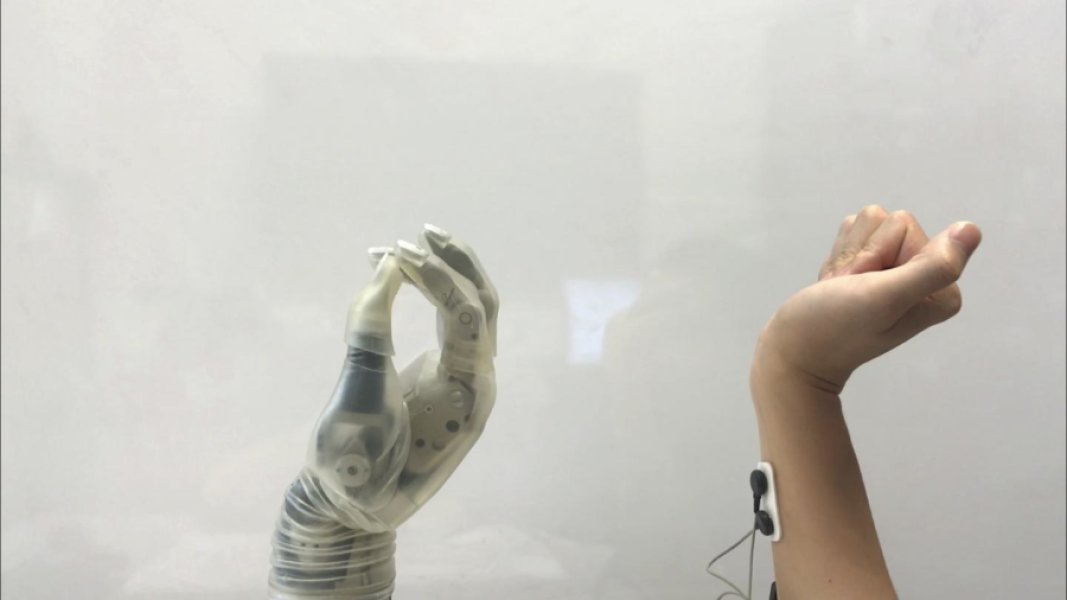
Вместо этого исследователи разработали пользовательскую модель опорно-двигательного аппарата. Исследователи поместили электромиографические датчики на предплечья шести трудоспособных добровольцев, отслеживая, какие именно нейромышечные сигналы были отправлены, когда они выполняли различные действия с запястьями и руками. Эти данные затем были использованы для создания общей модели, которая переводила эти нервно-мышечные сигналы в команды, которые манипулируют приведенным в действие протезом.
«Когда кто-то теряет руку, их мозг подключен к сети, как будто рука все еще там», — говорит Хелен. «Итак, если кто-то хочет поднять стакан воды, мозг все еще посылает эти сигналы на предплечье. Мы используем датчики, чтобы забрать эти сигналы, а затем передать эти данные на компьютер, где они подаются в виртуальную модель опорно-двигательного аппарата. Модель занимает место мышц, суставов и костей, рассчитывая движения, которые имели бы место, если бы рука и запястье были еще целыми. Затем компьютер передает эти данные в протез запястья и руки, которые выполняют соответствующие движения скоординированным образом и в режиме реального времени — более напоминающие естественное движение.
«Объединив наши знания о биологических процессах, лежащих в основе генерации движения, мы смогли создать новый нейронный интерфейс для протезирования, который является общим для нескольких пользователей, включая ампутанта в этом исследовании, и он надежен в разных позах рук», — говорит Хелен.
И исследователи считают, что потенциальные применения не ограничиваются протезными устройствами.
«Это может быть использовано для разработки устройств компьютерного интерфейса для трудоспособных людей». «Такие, как устройства для геймплея или для манипулирования объектами в программах САПР.»
В предварительном тестировании, как трудоспособные, так и ампутированные добровольцы смогли использовать интерфейс, управляемый моделью, для выполнения всех необходимых движений руки и запястья — несмотря на очень небольшую подготовку.
«В настоящее время мы ищем добровольцев, у которых есть трансрадиальные ампутации, чтобы помочь нам в дальнейшем тестировании модели для выполнения деятельности в повседневной жизни», — говорит Хелен. «Мы хотим получить дополнительную обратную связь от пользователей, прежде чем двигаться вперед с клиническими испытаниями.
«Чтобы было ясно, мы все еще далеки от того, чтобы технология стала коммерчески доступной для клинического использования», — подчеркивают исследователи. «И трудно предсказать потенциальную стоимость, так как наша работа сосредоточена на программном обеспечении, и основная часть затрат для ампутантов будет в оборудовании, которое фактически запускает программу. Однако, модель совместима с имеющимися протезами».
Исследователи также изучают идею включения машинного обучения в общую модель опорно-двигательного аппарата.
«Наша модель делает использование протезов более интуитивным и надежным, но машинное обучение может позволить пользователям получить более тонкий контроль, позволяя программе узнать ежедневные потребности и предпочтения каждого человека и лучше адаптироваться к конкретному пользователю в долгосрочной перспективе», — говорят исследователи.
Больше информации: Lizhi Pan, Dustin L. Crouch, He Helen Huang. Myoelectric Control Based on A Generic Musculoskeletal Model: Towards A Multi-User Neural-Machine Interface. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2018; 1 DOI: 10.1109/TNSRE.2018.2838448