Инженеры создали робота-ящерицу для исследования поверхности Марса
Технологические достижения открыли захватывающие возможности для исследования космоса, которые могут привести к новым открытиям в Солнечной системе. Роботы оказались особенно многообещающими инструментами для исследования других планет, в частности Марса.
Исследование Марса и его поверхности — увлекательный процесс, поскольку он может выявить признаки прошлой или настоящей внеземной жизни. Помимо потенциального раскрытия форм древней микробной жизни, исследования могут привести к открытию ресурсов, существующих за пределами Земли, что потенциально проложит путь для будущих миссий человека на Марс.
Исследователи из Нанкинского университета аэронавтики и астронавтики недавно разработали нового четвероногого робота, вдохновленного ящерицами, который может помочь в исследовании поверхности красной планеты. Их робот, представленный в журнале Biomimetics MDPI, имеет гибкую структуру тела, которая может воспроизводить движения и стиль передвижения пустынной ящерицы.
«Чтобы помочь амбициозным беспилотным миссиям на Марс, были разработаны определенные типы планетоходов для выполнения задач на поверхности Марса», — говорят ученые. «Из-за того, что поверхность состоит из зернистого грунта и камней разного размера, современные марсоходы могут испытывать трудности при передвижении. Чтобы преодолеть эти трудности, в рамках исследования разрабатывается четвероногий ползучий робот, вдохновленный особенностями передвижения пустынной ящерицы».
Биомиметический робот состоит из гибкой конструкции, напоминающей позвоночник, и четырех ног. Чтобы воспроизвести «ползучее» движение, типичное для ящериц, каждая нога имеет два шарнира и механизм, который вызывает качательное движение.
Каждый из тазобедренных суставов, соединяющих структуру позвоночника с ногами робота, состоит из двух сервоприводов и четырехрычажного механизма, который позволяет роботу подниматься, не теряя равновесия. «Ноги» робота имеют четыре гибких «пальца», состоящих из двух шарниров и когтя.
«В конструкции ноги используется четырехрычажный механизм, который обеспечивает устойчивое подъемное движение», — объясняют исследователи в своей статье. «Стопа состоит из активной лодыжки и круглой подушечки с четырьмя гибкими пальцами, которые эффективно цепляются за почву и камни».
Чтобы воспроизвести движения ящериц, исследователи создали серию кинематических моделей для каждого из компонентов своего робота. Затем они использовали эти модели и числовые расчеты для планирования движений робота.
«Для определения движений робота создаются кинематические модели стопы, ноги и позвоночника. Более того, скоординированные движения между позвоночником туловища и ногой подтверждены числовым методом».
Сначала исследователи оценили своего робота в серии симуляций, чтобы определить, может ли он эффективно воспроизводить движения ящериц. Их результаты были очень многообещающими, так как они обнаружили, что робот может выполнять желаемые движения и стиль ходьбы.
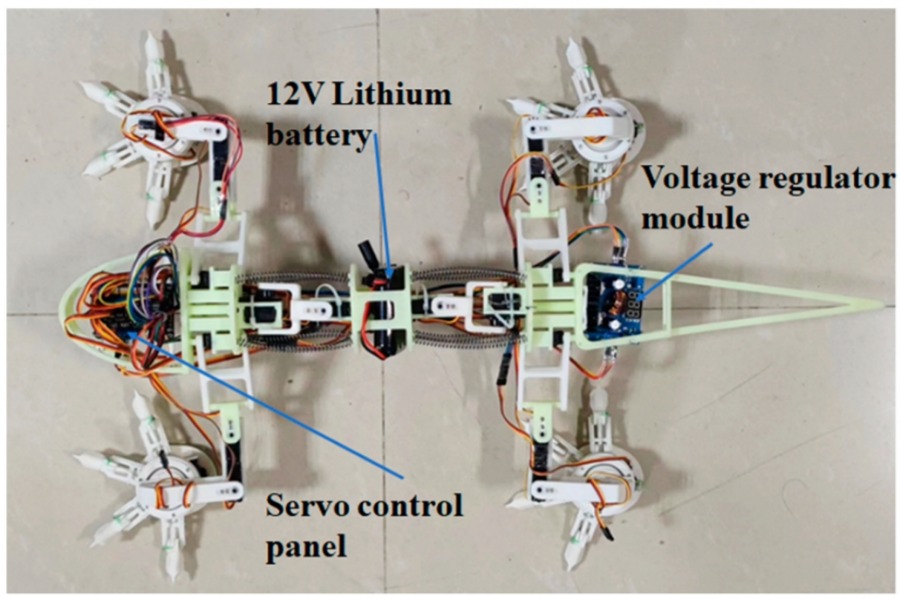
Ученые уже создали прототип своего робота, используя полимерные материалы, напечатанные на 3D-принтере, панель сервоуправления, литиевую батарею и другие электронные компоненты. Затем они использовали испытательный стенд для моделирования, чтобы оценить движения своего робота-прототипа на каменистых поверхностях, которые напоминают местность на Марсе.
Они обнаружили, что робот может эффективно двигаться в каменистой среде, что подчеркивает его потенциал для будущих миссий на красной планете.
Однако, прежде чем его можно будет протестировать за пределами лаборатории, инженерам необходимо будет доработать его, например, добавить герметизирующую структуру, которая защитит его от почвы или переносимой по воздуху пыли, и построить его корпус с использованием более стойких материалов.
Ученые сейчас работают над моделями машинного обучения, которые позволят их роботу адаптировать свои движения к разным ландшафтам. Кроме того, планируется внедрить систему, которая обеспечивала бы непрерывное питание робота.
Робот был представлен в статье, опубликованной в журнале Biomimetics.
Присоединяйтесь к нам в соцсетях
