Увидеть невидимое
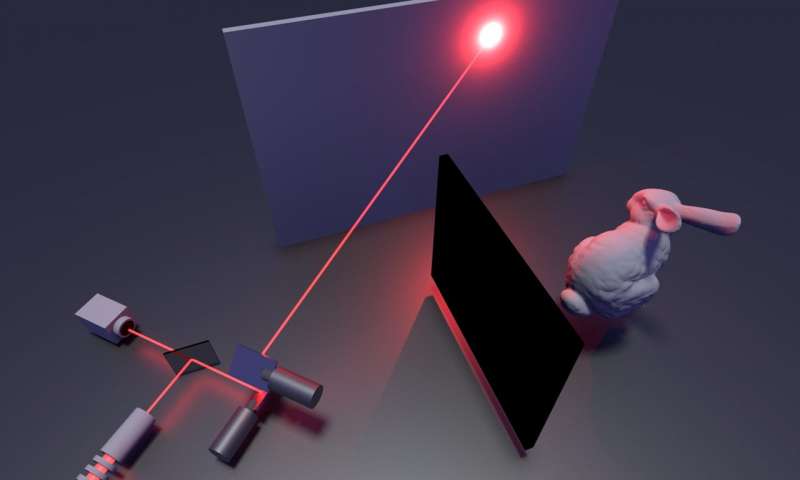
Изображение: Stanford Computational Imaging Lab
Беспилотный автомобиль пробирается по извилистой соседней улице, чтобы сделать резкий поворот на дорогу, на которую только что выкатился детский мяч. Хотя ни один человек в машине не может видеть этот мяч, машина останавливается, чтобы избежать столкновения. Это связано с тем, что автомобиль оснащен чрезвычайно чувствительной лазерной технологией, которая отражает соседние объекты, чтобы иметь возможность заглянуть за стену.
Этот сценарий является одним из многих, которые исследователи из Стэнфордского университета предлагают для системы, которая может создавать изображения объектов, скрытых от зрения. Они ориентированы на приложения для автономных транспортных средств, некоторые из которых уже имеют аналогичные лазерные системы для обнаружения объектов вокруг автомобиля, но другие виды использования могут включать в себя наблюдение за воздушными транспортными средствами или предоставление спасательным командам возможности находить людей, заблокированных во время землетрясений и других катастроф.
«Это звучит как магия, но идея визуализации без прямой видимости практически осуществима», — сказал Гордон Вецштейн, доцент электротехники и старший автор статьи, описывающей эту работу, опубликованную 5 марта в Nature.
«Существенная проблема при визуализации без прямой видимости — это эффективный способ восстановления трехмерной структуры скрытого объекта из шумовых измерений», — сказал Дэвид Линдел, студент-выпускник в Стэнфордской лаборатории вычислительной визуализации и co-автор исследования. «Я думаю, что большое влияние этого метода заключается в том, насколько он эффективен с точки зрения вычислительной эффективности».
Для своей системы исследователи устанавливают лазер рядом с высокочувствительным детектором фотонов, который может уловить даже одну частицу света. Они снимают импульсы лазерного излучения на стене и, невидимые для человеческого глаза, эти импульсы отскакивают от объектов вокруг угла и возвращаются к стене и к детектору. В настоящее время это сканирование может занимать от двух минут до часа, в зависимости от условий, таких как освещение и отражательная способность скрытого объекта.
Как только сканирование закончено, алгоритм распутывает пути захваченных фотонов и размытая капля изображения принимает гораздо более резкую форму. Он делает все это менее чем за секунду и настолько эффективен, что может работать на обычном ноутбуке. Основываясь на том, насколько хорошо алгоритм работает в настоящее время, исследователи считают, что они могут ускорить его, чтобы он был почти мгновенным после завершения сканирования.
Команда продолжает работать над этой системой, поэтому в будущем она может лучше справляться с изменчивостью реального мира и быстрее выполнять сканирование. Например, расстояние до объекта и количество окружающего света могут затруднить их технологию, чтобы увидеть легкие частицы, необходимые для устранения объектов вне поля зрения. Этот метод также зависит от анализа рассеянных легких частиц, которые намеренно игнорируются системами наведения в настоящее время в автомобилях, известными как системы LIDAR.
«Мы полагаем, что алгоритм вычисления уже готов к системам LIDAR, — сказал Мэтью О’Тул, аспирант из Стэнфордской лаборатории вычислительной визуализации и соавтор статьи. «Ключевой вопрос заключается в том, поддерживает ли текущее оборудование систем LIDAR этот тип изображений».
Прежде чем эта система будет готова к работе, она должна будет лучше работать при дневном свете и при движущихся объектах, например, прыгающем мяче или бегущем ребенке. «Это большой шаг вперед в нашей области, который, мы надеемся, принесет пользу всем нам», — сказал Гордон Вецштейн.