Захват в стиле киригами поднимает хрупкие предметы, не ломая их
Большинство роботизированных захватов работают, оказывая давление на объект с любой стороны — такой подход может повредить хрупкие предметы. Однако новый захват решает эту проблему благодаря древнему японскому искусству.
Связанное с искусством складывания бумаги оригами, киригами включает в себя создание ряда параллельных прорезей в плоском листе материала.
Когда такой двумерный лист впоследствии раздвигают, толкают внутрь, скручивают или иным образом им манипулируют, прорези заставляют его изгибаться в заданную трехмерную форму.
В последние годы мы видели, как форма искусства используется во всем: от программируемых воздушных шаров до роботизированных змей и противоскользящих подошв для обуви.
Трехмерная форма, которую принимает лист киригами, определяется не только узорами прорезей и способом манипулирования им, но и формой плоского листа. Лист в форме диска, например, обычно превращается в сферу.
Теперь ученые разработали компьютерную программу, которая определяет, какая форма листа, рисунок разреза и тип манипуляции необходимы для получения заданной трехмерной формы.
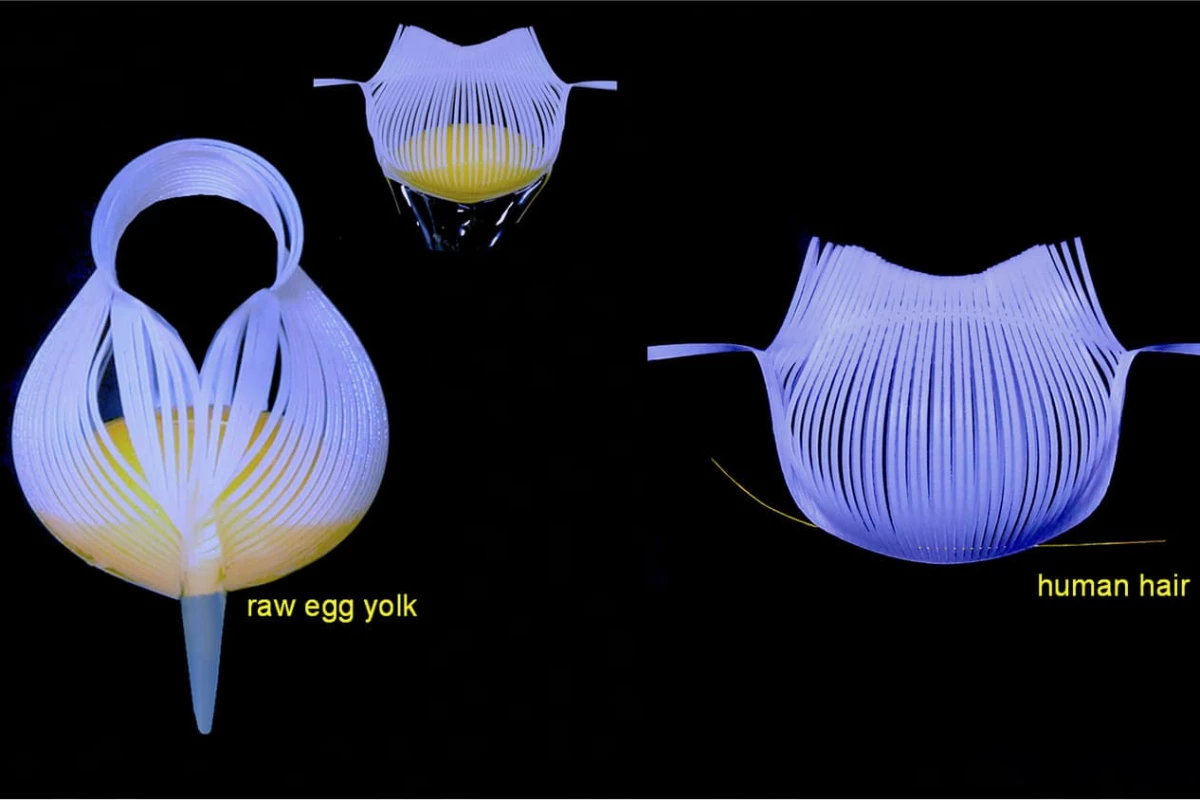
Они использовали эту технологию для создания гибкого роботизированного захвата, две стороны которого скользят вместе под хрупким объектом, встречаются на его нижней стороне и окружают его, как пара сложенных чашечкой рук.
Устройство не только достаточно мягкое, чтобы поднять яичный желток, не разбивая его, но и достаточно точное, чтобы схватить и поднять человеческий волос.
«Это проверка концепции, которая показывает, как работает наша техника», — говорят исследователи. «Сейчас мы находимся в процессе интеграции этой новой техники в технологии мягкой робототехники для решения промышленных задач».
Статья об исследовании была недавно опубликована в журнале Nature Communications.
Захват демонстрируется в следующем видео.